非线性优化
状态估计问题
最大后验与最大似然
经典slam模型:
{xk=f(xk−1,uk)+wkzk,j=h(yj,xk)+vk,j
对机器人状态的估计,就是求已知输入数据$ u 和观测数据 z 的条件下,计算状态 x $的条件概率分布。
最小二乘法:
J(x)=k∑ev,kTRk−1ev,k+k∑k∑ey,k,jTQk,j−1ey,k,j
它的最优解等价于状态的最大似然估计。
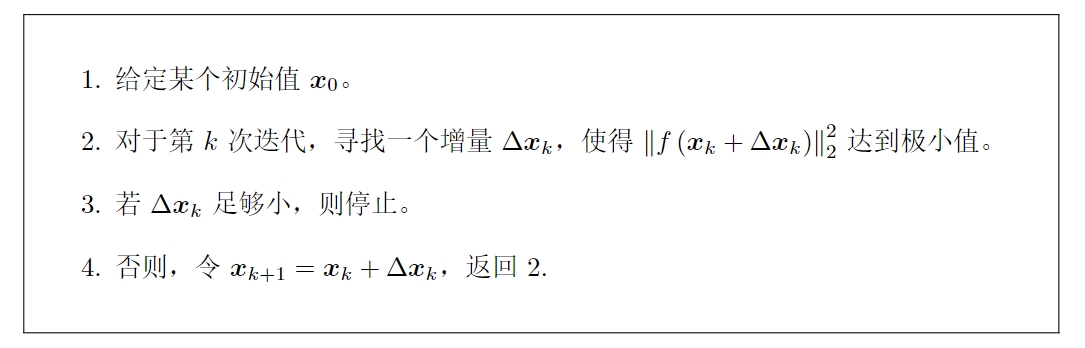
对于一个简单的最小二乘问题:
xmin21∣∣f(x)∣∣22
对于Δxkd的确定可以采用下面方法:
∣∣f(x+Δx)∣∣22≈∣∣f(x)∣∣22+J(x)Δx+21ΔxTHΔx
选择Δx∗=−JT(x)为最速下降法。
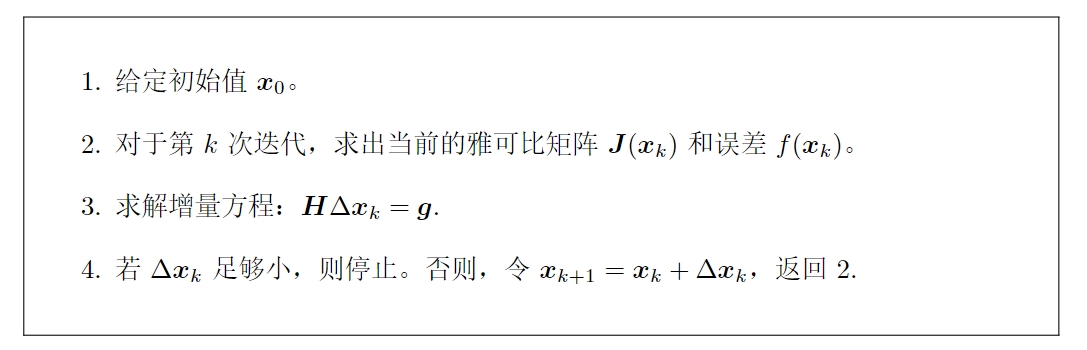
Gauss-Newton 的算法步骤可以写成:
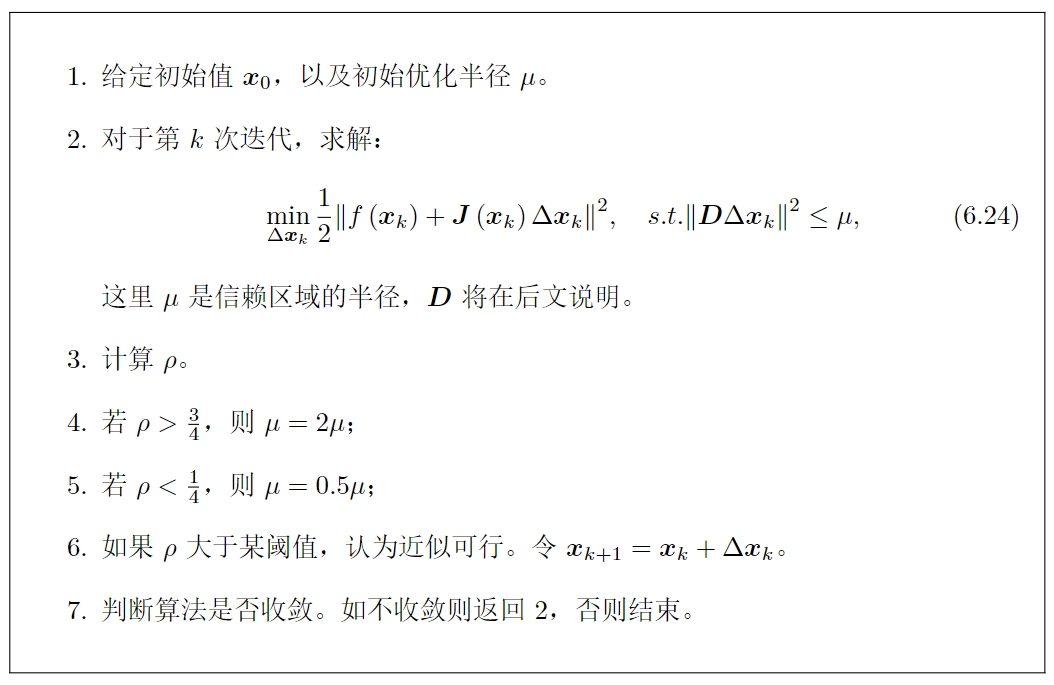
Levenberg-Marquadt 的算法步骤可以写成: