相机模型
针孔模型和畸变构成了相机的内参数。
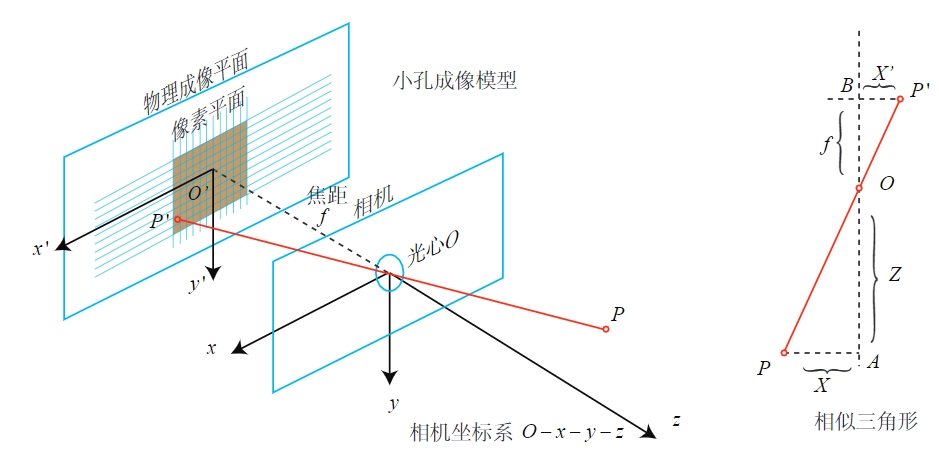
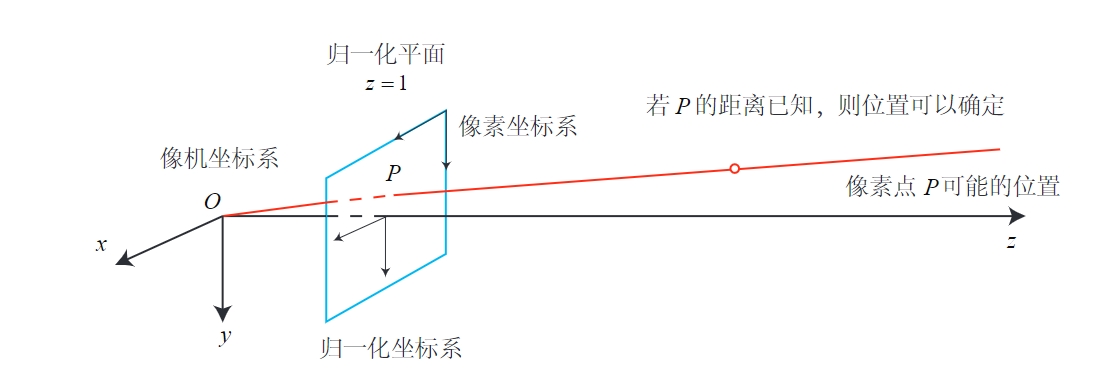
针孔相机模型
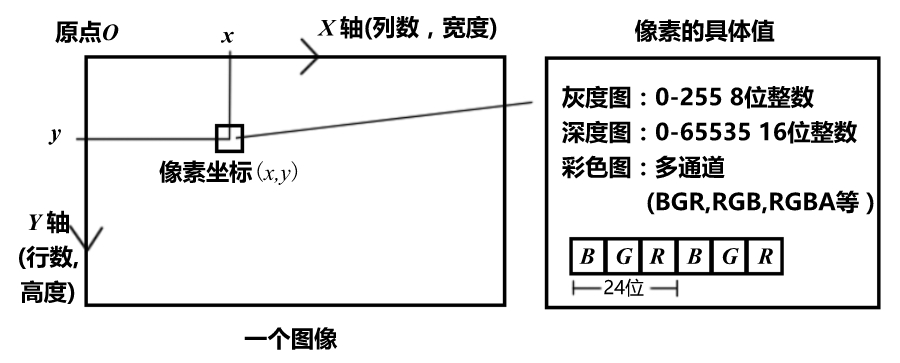
物体与像的数学模型
像与像素的数学模型
{u=αX′+cx=fxZX+cxv=βY′+cy=fyZY+cy
也即:
Z⎝⎜⎛uv1⎠⎟⎞=⎝⎜⎛fx000fy0cxcy1⎠⎟⎞⎝⎜⎛XYZ⎠⎟⎞≜KP
把中间的量组成的矩阵称为相机的内参数矩阵(Camera Intrinsics)K。相机的内参在出厂之后是固定的,不会在使用过程中发生变化。
相机的位姿由它的旋转矩阵$ R $和平移向量 t 来描述:
ZPμv=Z⎣⎢⎡uv1⎦⎥⎤=K(RPw+t)=KTPw
相机的位姿R,t又称为相机的外参数 (Camera Extrinsics)
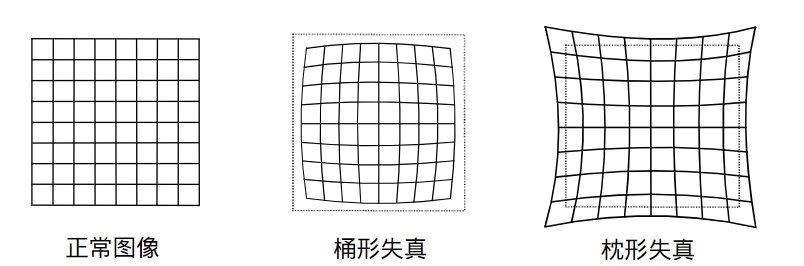
畸变
透镜的加入对成像过程中光线 的传播会产生新的影响: 一是透镜自身的形状对光线传播的影响,二是在机械组装过程中, 透镜和成像平面不可能完全平行。
径向畸变
由透镜形状引起的畸变称之为径向畸变。
对于径向畸变这类畸变可以用和距中 心距离有关的二次及高次多项式函数进行纠正。

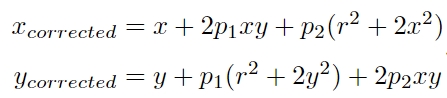
切向畸变
在相机的组装过程中由于不能使得透镜和成像面 严格平行也会引入切向畸变。

对于切向畸变,可以使用另外的两个参数 p1; p2 来进行纠正:
双目相机模型
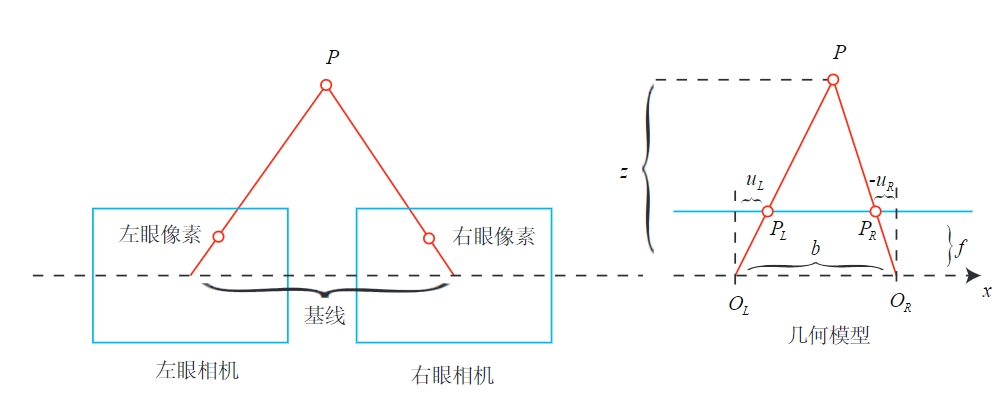
d=uL−uR
d为称为视差
RGB-D 相机模型
- 通过红外结构光 (Structured Light) 来测量像素距离的。 例子有 Kinect 1 代、 Project Tango 1 代、Intel RealSense 等:
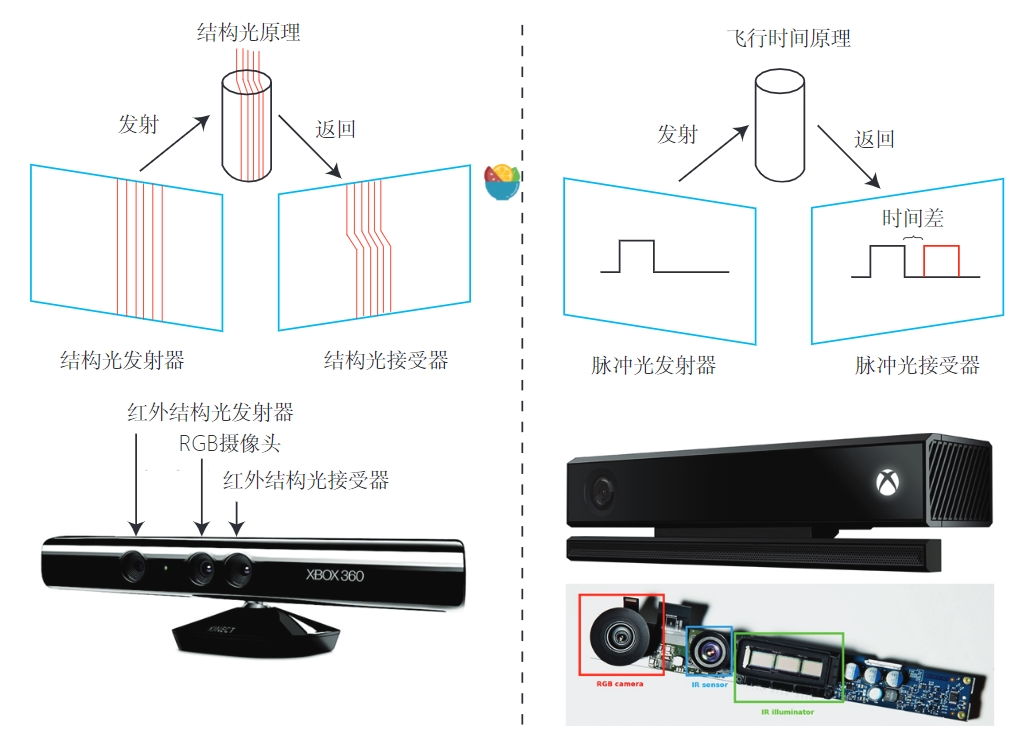
- 通过飞行时间法(Time-of-flight, ToF)原理测量像素距离的。例子有 Kinect 2 代和 一些现有的 ToF 传感器等。